 Paper
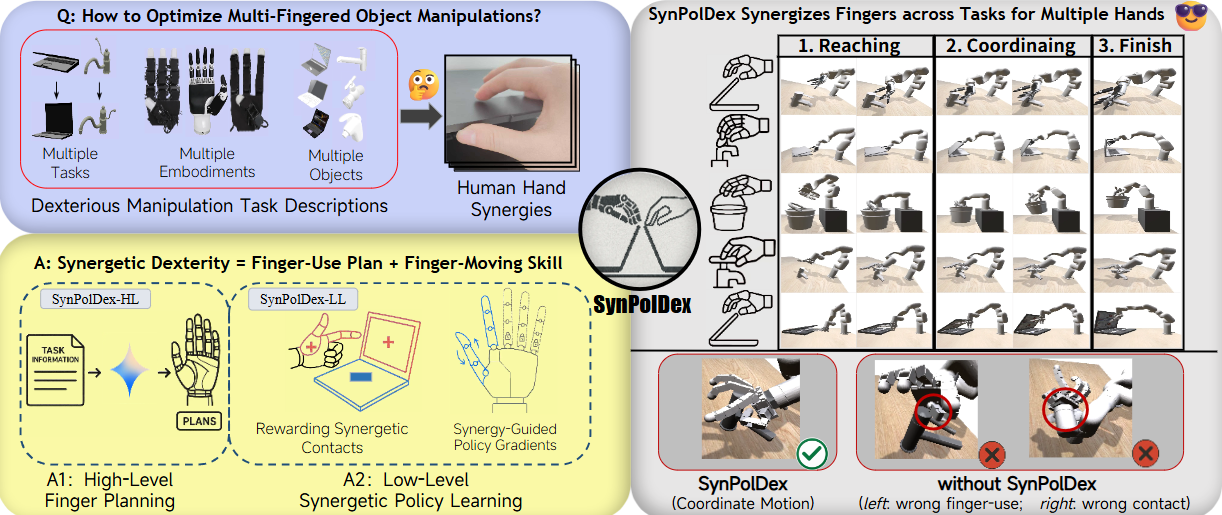
Paper SynPolDex — Synergizing Fingers via Bi-Level Policy Learning
A bi-level framework for finger coordination in multi-fingered robot hands, combining high-level finger-role planning with low-level control.
2025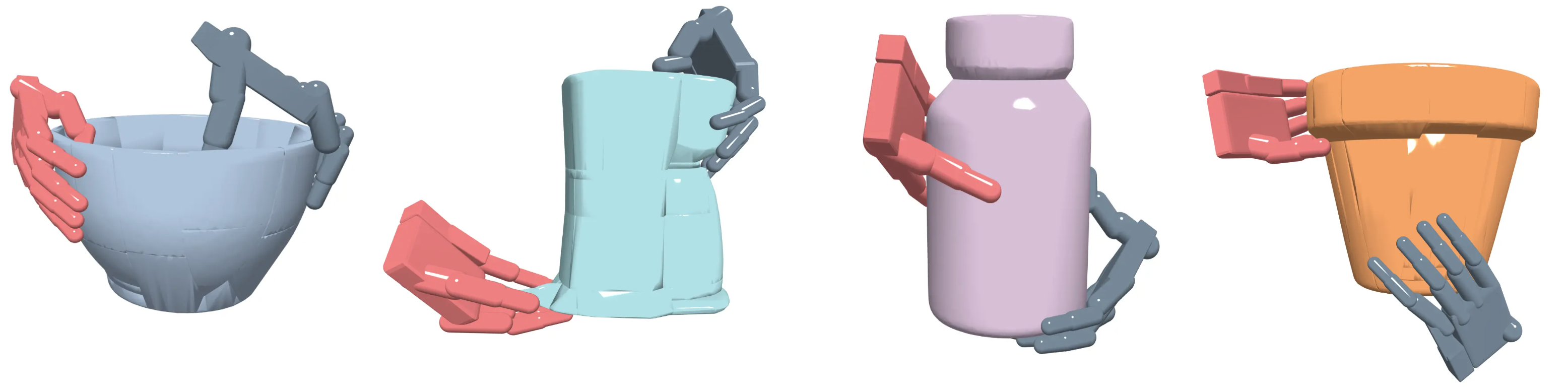 Paper
Paper BimanGrasp — Bimanual Grasp Synthesis for Dexterous Robot Hands
Physics-verified bimanual grasp synthesis for dexterous hands, with a 150K-scale dataset built over 900 everyday objects.
2024